


QGroundControl (Daily Test Build)
توضیحات QGroundControl (Daily Test Build)
IMPORTANT: This version of QGroundControl is the daily testing version. It may not be as stable as the supported Stable version. It has all the latest features which are being added daily by the QGroundControl development team. This version should be sued with caution.
QGroundControl provides full flight control and configuration for ArduPilot or PX4 Pro powered vehicles. The goal for QGroundControl is improved ease of use for new users as well as high end feature support for experienced users.
QGroundControl features:
- Full configuration support for vehicles running PX4 Pro and ArduPilot (ArduCopter, ArduPlane, ArduRover, ArduSub ) firmware
- Mission planning for autonomous flight
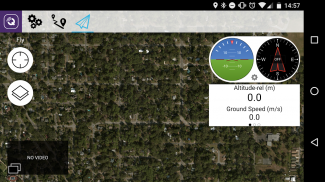
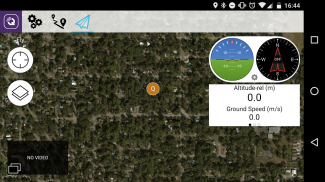
- Flight map display showing vehicle position, flight track, waypoints and vehicle instruments
- Video streaming with instrument display overlays
- Flight support for any MAVLink capable vehicle
QGroundControl is also available for Windows, MacOS, Linux and iOS.
Release Notes
QGroundControl Official Site
Documentation
Support
مهم: این نسخه از QGroundControl نسخه آزمایش روزانه است. ممکن است به اندازه نسخه پایدار پشتیبانی نشده پایدار باشد. این آخرین ویژگی های جدیدی را دارد که روزانه توسط تیم توسعه QGroundControl اضافه می شود. این نسخه باید با احتیاط شکایت شود.
QGroundControl کنترل کامل و پیکربندی پرواز را برای خودروهای دارای موتور ArduPilot یا PX4 Pro فراهم می کند. هدف QGroundControl سهولت استفاده برای کاربران جدید و همچنین پشتیبانی از ویژگی های بالا برای کاربران با تجربه بهبود یافته است.
ویژگی های QGroundControl:
- پشتیبانی از پیکربندی کامل برای سیستم عامل های PX4 Pro و ArduPilot (ArduCopter ، ArduPlane ، ArduRover ، ArduSub)
- برنامه ریزی ماموریت برای پرواز خودمختار
- نمایش نقشه پرواز موقعیت مکانی خودرو ، مسیر پرواز ، ایستگاههای بین راه و وسایل نقلیه را نشان می دهد
- پخش ویدئو با نمایشگرهای ساز
- پشتیبانی پرواز برای هر وسیله نقلیه MAVLink قادر
QGroundControl برای ویندوز ، MacOS ، لینوکس و iOS نیز موجود است.
یادداشت های انتشار
سایت رسمی QGroundControl
مستندات
پشتیبانی
QGroundControl (Daily Test Build) - نسخه 4.1.0-8-g246d5742b
(18-01-2021)QGroundControl (Daily Test Build) - اطلاعات APK
نسخه APK: 4.1.0-8-g246d5742bحزمة: org.mavlink.qgroundcontrolbetaآخرین نسخه QGroundControl (Daily Test Build)
سایر نسخهها














اپلیکیشنها در دسته مشابه

شاید دوست داشته باشید...









